
- Definice a princip činnosti
- Konstrukce rotoru
- Synchronní start motoru
- Druhy
- Oblast působnosti 1. \ T
- Výhody a nevýhody
Pomozte vývoji webu a sdílení článku s přáteli!
Synchronní elektromotory (DM) nejsou tak běžné jako asynchronní s rotorem klece veverky. Používají se tam, kde je zapotřebí velký točivý moment a v průběhu práce dochází k častému přetížení. Také tento typ motoru se používá tam, kde je zapotřebí větší výkon pro pohon mechanismu, kvůli vysokému účiníku a schopnosti zlepšit účiník sítě, což výrazně sníží náklady na elektřinu a zatížení na lince. Co je to synchronní motor, kde se používá a jaké jsou jeho výhody, minusy, uvažujeme v tomto článku.
Definice a princip činnosti
Zjednodušeně řečeno, synchronní je elektromotor, jehož rychlost otáčení rotoru (hřídele) se shoduje s rychlostí otáčení magnetického pole statoru.
Pojďme se stručně zabývat principem fungování takového elektromotoru - je založen na interakci rotujícího magnetického pole statoru, které je obvykle tvořeno třífázovým střídavým proudem a konstantním magnetickým polem rotoru.
Konstantní magnetické pole rotoru je tvořeno budícím vinutím nebo permanentními magnety. Proud ve vinutích statoru vytváří rotující magnetické pole, zatímco rotor v provozním režimu je permanentní magnet, jehož póly se ponoří na opačné póly magnetického pole statoru. V důsledku toho se rotor otáčí synchronně se statorovým polem, což je jeho hlavní znak.
Připomeňme si, že v asynchronním motoru se rychlost otáčení statoru MP a otáčky rotoru liší podle velikosti skluzu a jeho mechanická charakteristika je „hučena“ s maximem při kritickém skluzu (pod jeho jmenovitou rychlostí otáčení).
Rychlost, při které se magnetické pole statoru otáčí, může být vypočtena podle následující rovnice:
N = 60f / p
f je aktuální frekvence ve vinutí, Hz, p je počet párů pólů.
Podle stejného vzorce je tedy stanovena rychlost otáčení hřídele synchronního motoru.
Většina AC motorů používaných ve výrobě je vyrobena bez permanentních magnetů, ale s budícím vinutím, zatímco nízkonapěťové synchronní střídavé motory jsou vyrobeny s permanentními magnety na rotoru.
Proud budícího vinutí je napájen kroužky a kartáčovou sestavou. Na rozdíl od elektromotoru kolektoru, kde se používá kolektor pro přenos proudu do rotující cívky (soubor podélně uspořádaných desek), jsou na jednom ze konců statoru instalovány synchronní prstence.

Zdrojem excitace stejnosměrného proudu je v současné době tyristorové patogeny, často nazývané "VTE" (po názvu jedné ze série takových zařízení domácí výroby). Dříve byl použit generátorový budicí systém, kdy byl na stejném hřídeli jako motor instalován generátor (známý také jako patogen), který přivedl proud přes odpory k vinutí vinutí.
Rotor téměř všech synchronních stejnosměrných motorů je prováděn bez budicího vinutí, ale s permanentními magnety, i když jsou v zásadě podobné AC LED, liší se velmi od klasických třífázových strojů tak, jak jsou připojeny a provozovány.
Jednou z hlavních charakteristik elektromotoru je mechanická charakteristika. V synchronních elektromotorech je blízko rovné vodorovné linie. To znamená, že zatížení hřídele neovlivňuje jeho rychlost (dokud nedosáhne určité kritické hodnoty).
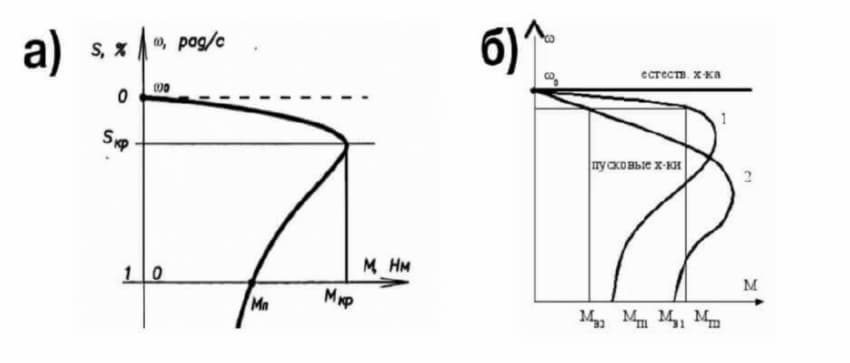
Toho je dosaženo díky excitaci konstantním proudem, proto synchronní elektromotor udržuje konstantní otáčky dokonale při proměnlivém zatížení, přetížení a při poklesu napětí (až do určitého limitu).
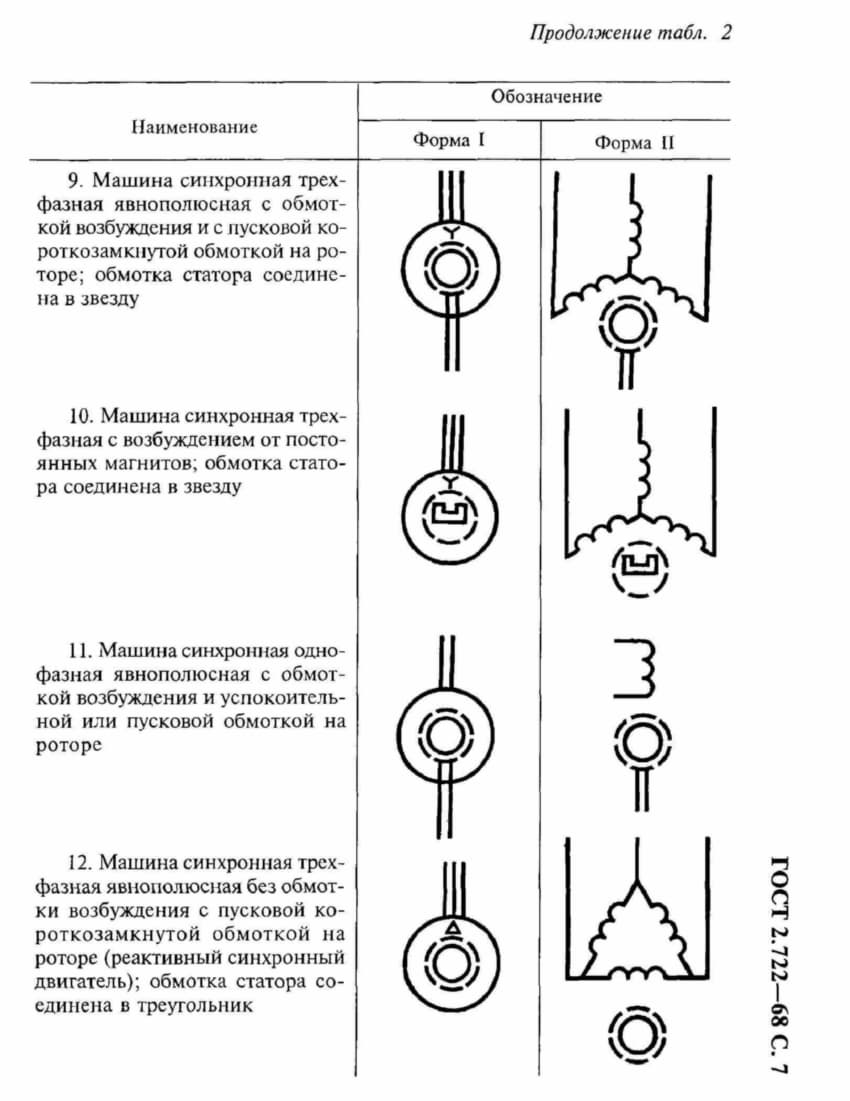
Níže vidíte symbol na schématu synchronního stroje.
Konstrukce rotoru
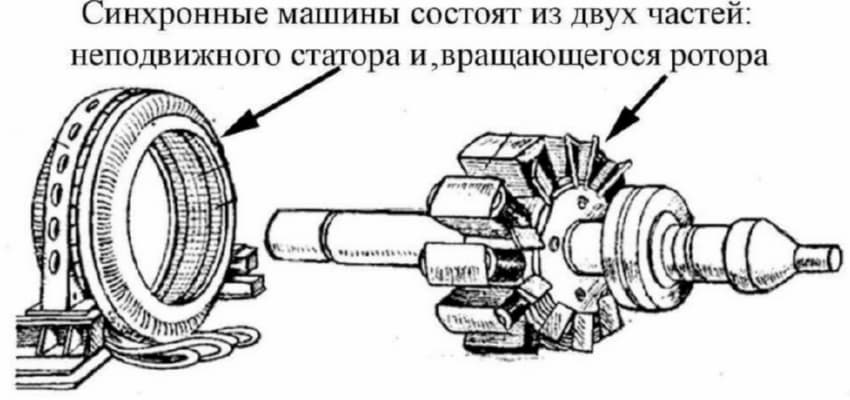
Synchronní motor sestává ze dvou hlavních částí:
- Stator Jsou v něm vinutí. Také se nazývá kotva.
- Rotor. Na něm jsou instalovány permanentní magnety nebo vinutí vinutí. To je také nazýváno induktorem, protože jeho účel - vytvořit magnetické pole).
Pro napájení proudu budícího vinutí jsou na rotoru instalovány 2 kroužky (protože excitace je stejnosměrný, jeden z nich je napájen „+“ a druhý „-“). Kartáče připevněné k držáku kartáče.
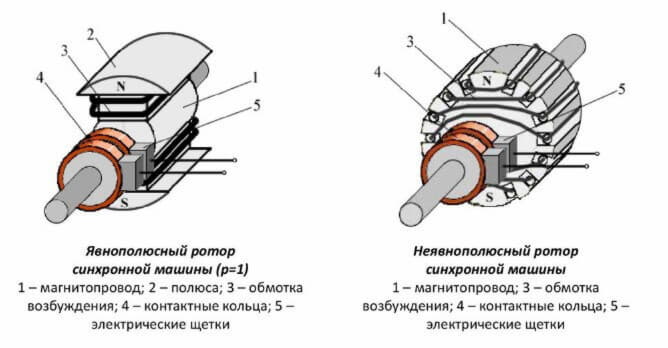
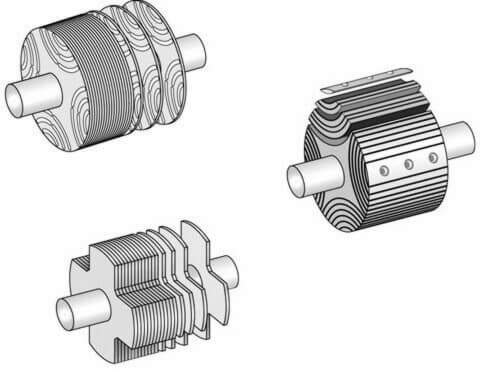
Rotory synchronních elektromotorů střídavého proudu mají dva typy v závislosti na účelu:
- Pravý sloup. Tyče (cívky) jsou jasně viditelné. Používá se při nízkých rychlostech a velkém počtu pólů.
- Off-pól - vypadá jako kulatý blok, ve slotu, na kterém jsou položeny dráty vinutí. Používá se při vysokých otáčkách (3000, 1500 ot / min) a malém počtu pólů.
Synchronní start motoru
Funkce tohoto typu elektromobilů spočívá v tom, že nelze jednoduše zapojit do sítě a počkat, až začne. Kromě práce LED je potřeba nejen zdroj budicího proudu, ale také poměrně komplikovaný startovací režim.
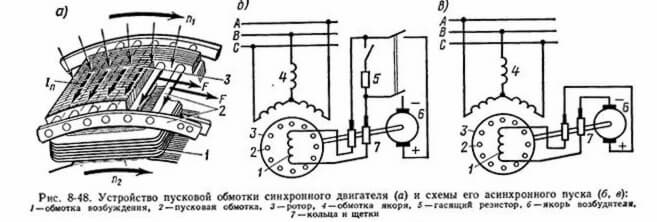
K rozběhu dochází jako u asynchronního motoru a k vytvoření startovacího momentu je vedle rotačního budicího vinutí na rotoru umístěna přídavná zkratová vinutí „klec“. To se také nazývá „tlumení“ vinutí, protože zvyšuje stabilitu při náhlém přetížení.
Buzení proudem v vinutí rotoru při startu chybí a když se zrychlí na subsynchronní otáčky (o 3 - 5% méně synchronní), aplikuje se budící proud, po kterém osciluje proud statoru a motor přejde do synchronizace a přejde do provozu.
Aby se omezily počáteční proudy strojů s vysokým výkonem, někdy snižují napětí na svorkách vinutí statoru připojením autotransformátoru nebo odporů v sérii.
Zatímco je synchronní stroj spuštěn v asynchronním režimu, rezistory jsou připojeny k vinutí vinutí, jehož odpor překračuje odpor samotného vinutí 5 až 10 krát. To je nezbytné, aby pulzující magnetický tok vznikající při působení proudů indukovaných ve vinutí během spouštění nezpomalil zrychlení a také aby nedošlo k poškození vinutí v důsledku indukovaného emf.
Druhy
Existuje mnoho typů takových strojů, výše popsaný byl návrh synchronního střídavého elektromotoru s budícími vinutími, který je nejběžnější ve výrobě. Existují i jiné typy, například:
- Synchronní motory s permanentními magnety. Jedná se o různé elektromotory, jako je PMSM - synchronní motor s permanentním magnetem, BLDC - Brushless Direct Current a další. Rozdíly mezi nimi jsou v regulační metodě a tvaru proudu (sinusové nebo lichoběžníkové). Také se nazývají bezkartáčové nebo bezkartáčové motory. Používá se pro obráběcí stroje, modely řízené rádiem, elektrické nářadí atd. Pracují přímo z DC, ale prostřednictvím speciálního převodníku.
- Krokové motory - synchronní bezkartáčové motory, ve kterých rotor přesně drží předem stanovenou polohu, slouží k umístění pracovního nástroje do CNC obráběcích strojů ak řízení různých prvků automatických systémů (například polohy škrticí klapky v automobilu). Skládají se ze statoru, v tomto případě jsou na něm umístěna budicí vinutí a rotor, který je vyroben z měkkého magnetického nebo tvrdého magnetického materiálu. Strukturně velmi podobné předchozím typům.
- Reaktivní.
- Hystereze
- Reaktivní hystereze.
Poslední tři typy DM také nemají kartáče, pracují díky speciální konstrukci rotoru. V reaktivním diabetu se rozlišují tři z nich: křížový stratifikovaný rotor, rotor s výraznými póly a axiálně stratifikovaný rotor. Vysvětlení principu jejich práce je poměrně obtížné a bude to trvat velké množství, takže to vynecháme. Takové elektromotory se v praxi pravděpodobně setkávají zřídka. Jedná se především o nízkoenergetické stroje používané v automatizaci.
Oblast působnosti 1. \ T
Synchronní motory jsou dražší než asynchronní, kromě toho vyžadují dodatečný zdroj buzení stejnosměrným proudem - což částečně snižuje šířku tohoto typu elektrických strojů. Synchronní elektromotory se však používají k pohonu mechanismů, kde je možné přetížení a je vyžadována přesná údržba stabilních otáček.

Nejčastěji se používá v oblasti vysokého výkonu - stovky kilowattů a jednotek megawattů a zároveň se začíná a zastavuje poměrně zřídka, to znamená, že stroje pracují po celý den dlouho. Toto použití je dáno tím, že synchronní stroje pracují s cosFi téměř 1, a mohou produkovat jalový výkon do sítě, v důsledku čehož dochází ke zlepšení účiníku sítě a snížení její spotřeby, což je důležité pro podniky.
Výhody a nevýhody
Jednoduše řečeno, každý elektrický vůz má své výhody a nevýhody. Pozitivní strana synchronního motoru je:
- Práce s cosFi = 1, kvůli excitaci stejnosměrným proudem, resp. Nespotřebovává jalový výkon ze sítě.
- Během provozu, s přeexcitací, je do sítě dodáván jalový výkon, což zlepšuje účiník sítě, pokles napětí a ztráty v něm a zvyšuje KM výkonových generátorů.
- Maximální moment vyvinutý na hřídeli SD je úměrný U a pro AD je to U² (kvadratická závislost na napětí). To znamená, že CD má dobrou nosnost a stabilitu práce, které jsou zachovány při poklesu napětí v síti.
- V důsledku toho je rychlost otáčení stabilní při přetížení a poklesu v mezích přetížitelnosti, zejména při zvyšujícím se budícím proudu.
Podstatnou nevýhodou synchronního motoru je však to, že jeho konstrukce je komplikovanější než konstrukce asynchronního motoru s zkratovým rotorem, je zapotřebí patogen, bez něhož nebude schopen pracovat. To vše vede k vyšším nákladům ve srovnání s asynchronními stroji a obtížemi při údržbě a provozu.
Možná, že výhody a nevýhody synchronních elektromotorů tam končí. V tomto článku jsme se snažili shrnout obecné informace o synchronních motorech. Pokud máte něco k přidání materiálu - napište do komentářů.
Materiály k tématu:
- Co je to rotor a stator
- Jak se přenáší elektřina na vzdálenosti bez vodičů
- Co je to frekvenční měnič